Over three days in July, just outside Edinburgh, researchers working on autonomous systems gathered for the first International Symposium on Trustworthy Autonomous Systems at Heriot-Watt University. Although the TAS project has been running for a few years, the pandemic prevented the TAS Hub and nodes from gathering the community to share their research into trustworthiness and autonomous systems. The talks and panels consisted of a diverse range of engineers, computer scientists and social scientists, including plenaries by Professors Sharon Strover and Gina Neff.

Aerial view of symposium attendees in the main auditorium

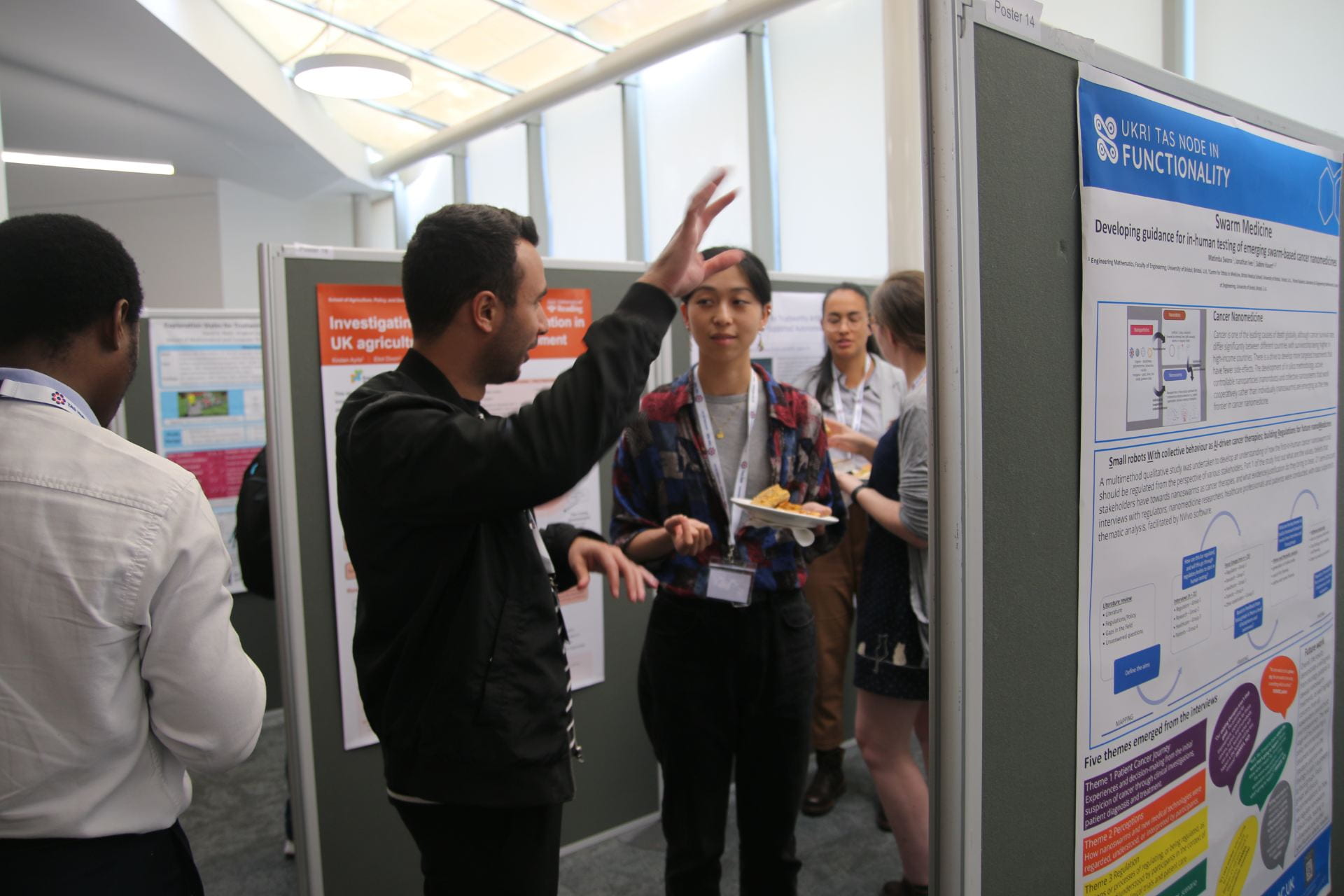
Dr Stephanie Sheir and Matimba Swana enjoying the National Robotarium

TAS node in functionality team gather for the symposium

Dr Sabine Hauert presenting on Swarms
Our functionality node presented four posters and two papers, over the course of the conference. Dr Sabine Hauert didn’t let unreliable public transport prevent her from giving a talk on “Trustworthy Swarms”, a collaboration of researchers across our node. We also presented a scoping review, with work from Dr Helen Smith, Dr Jonathan Ives, and our previous colleague Dr Ariana Manzini, on “Ethics of trust/worthiness in Autonomous Systems”.

PhD student Matimba Swana
PhD student Suet Lee
Dr Abdul Manan Khan

Dr Chris Bennett
The first day of the conference focussed on early career researchers, and a number of Early Career Researcher awards were presented to them at the nearby National Robotarium, in categories including Policy and Knowledge Transfer. We were delighted that Dr Helen Smith won one of the awards for Responsible Research and Innovation, which included a £4,000 grant towards her research. We look forward to sharing where this leads.

The Early Career Researchers receive their awards

Dr Helen Smith receiving her award
The award was presented by Dr Elvira Perez Vallejos

She won in the category “Responsible Research and Innovation”
After we’d been joined by our international colleagues, the nodes then had a further day at the All Hands Meeting, to share what we’d done over the previous 12 months. We heard from every node, plans for UKRI’s new Responsible AI initiative, and one of the panels involved Professor Dame Wendy Hall.
Thank you to the organisers and everyone who came along to make it such a useful, interesting and friendly event.
All images credited to photographer Ryan Warburton.





")